Note: Guidance
在这篇文章中我们介绍几种常见的为 Diffusion Model 添加 Guidance 的方法。所谓添加 Guidance 是说,我们给定一些额外的 condition(如 text prompt, other images),如何降低生成的多样性,提高生成的准确性,生成与这些 condition 相符的图片。
目前常用的两种加 Guidance 的方法:
- Classifier Guidance:通过一个 Classifier p(c∣zt) 来完成辅助的作用。具体来说,将生成过程的网络预测均值 μθ 朝着 Classifier 预测结果更加大的方向移动。(这里的 Classifier 不一定局限于分类器,比如在 GLIDE 中可以使用 CLIP score 来作为 Guidance 的优化目标,只要能算梯度就可以)
- Classifier-free Guidance:不利用 Classifier,而是通过修改训练目标让当前 Diffusion Model 同时具有条件生成和非条件生成的能力。
Classifier Guidance
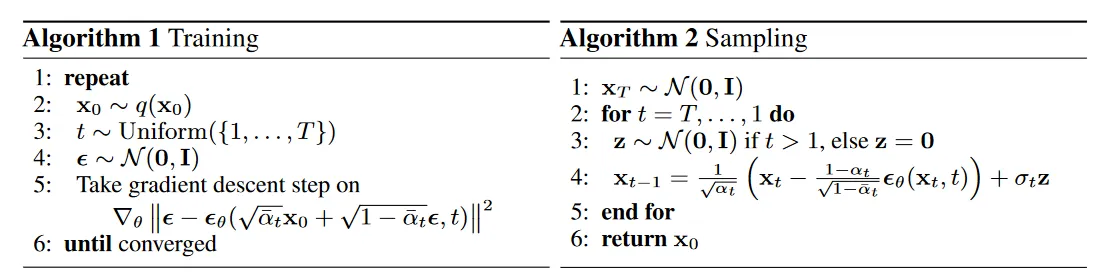
正如之前说的,这种方法通过一个 Classifier p(c∣zt) 来完成辅助的作用。这种方法不需要额外训练扩散模型,而是直接在已有的 Diffusion Model 上,通过 Classifier 来指导生成所期望的图像。
我们来给出其数学推导。假设我们有扩散模型反向过程 pθ(xt∣xt+1) ,如果我们想获得 condition 在 y 上的概率分布 pθ,ϕ(xt∣xt+1,y),我们可以有:
pθ,ϕ(xt∣xt+1,y)=Zpθ(xt∣xt+1)pϕ(y∣xt)
这里 Z 是归一化系数。再记:
pθ(xt∣xt+1)logpθ(xt∣xt+1)=N(μ,Σ)=−21(xt−μ)TΣ−1(xt−μ)+C
我们将 logpϕ(y∣xt) 在 xt=μ 附近做 Taylor 展开,有:
logpϕ(y∣xt)≈logpϕ(y∣xt)∣xt=μ+(xt−μ)∇xtlogpϕ(y∣xt)∣xt=μ=C1+(xt−μ)g
于是,如果记 g=∇xtlogpϕ(y∣xt)∣xt=μ,那么 condition 在 y 上的概率分布 pθ,ϕ(xt∣xt+1,y) 可以近似地记为:
log(pθ(xt∣xt+1)pϕ(y∣xt))≈−21(xt−μ)TΣ−1(xt−μ)+(xt−μ)g+C2=−21(xt−μ−Σg)TΣ−1(xt−μ−Σg)+21gTΣg+C2=−21(xt−μ−Σg)TΣ−1(xt−μ−Σg)+C3=logp(z)+C4,z∼N(μ+Σg,Σ)
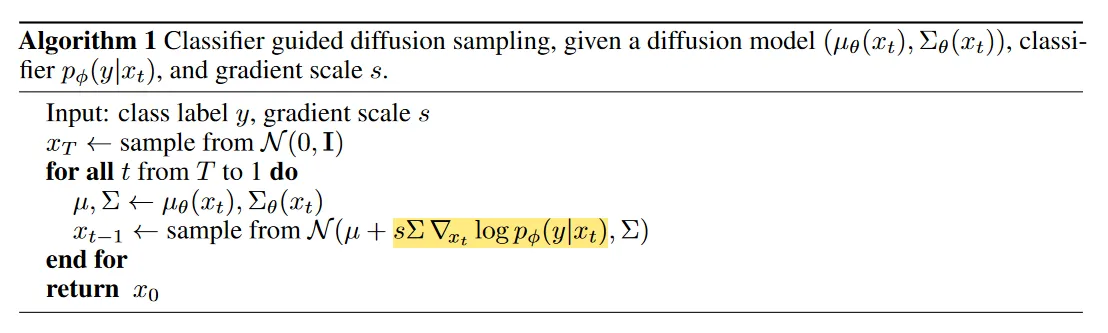
这也就是采样过程中梯度反传的来源:
因为我们的 Classifier 要在带噪声的图片上做预测,所以这个 Classifier 最好不要直接用预训练好的模型,应该用其它的数据增广方法使其具有一定的鲁棒性。(如在噪声图片上也做过训练)
Classifier-free Guidance
上述方法引入的 Classifier 会降低最终 Diffusion Model 的推理速度,而且如果直接使用任务的 Metric 作为 Classifier 的优化目标,也会有拟合 Metric 的嫌疑。这时就有了 Classifier-free 的 Guidance 方法出现:
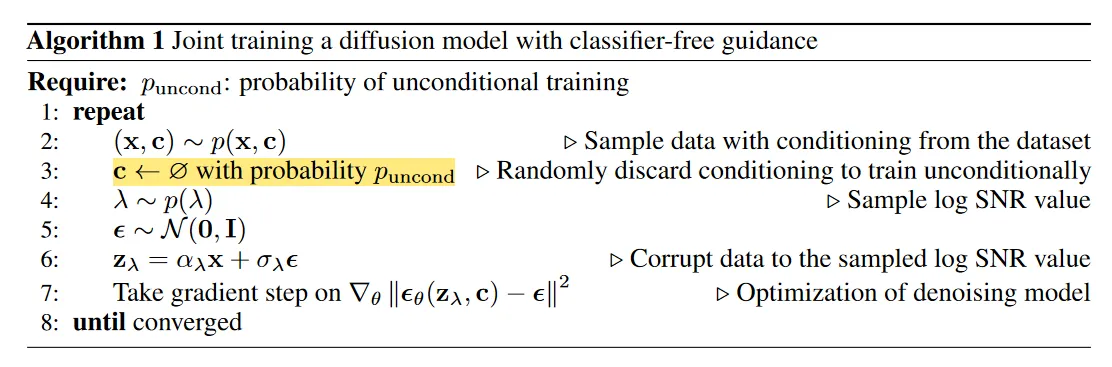
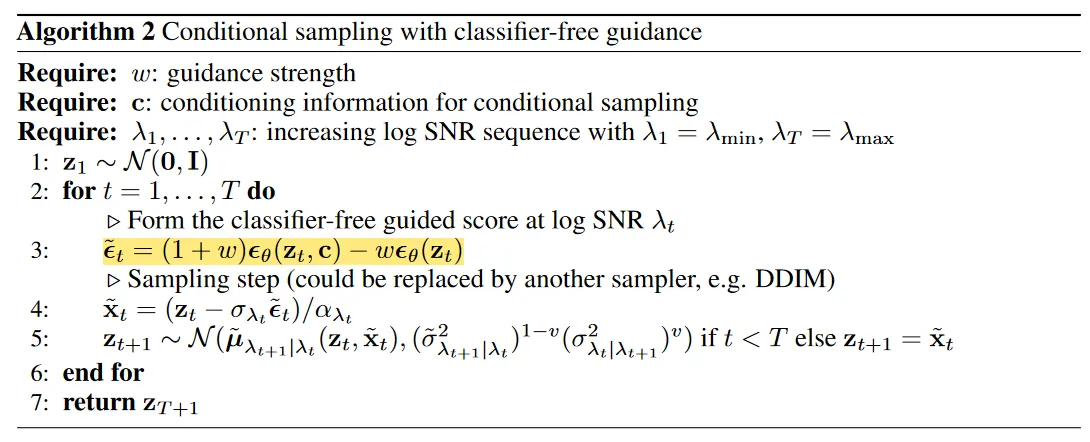
正如我们上面所说,Classifier-free 的方法不引入 Classifier,而是通过修改训练目标让当前 Diffusion Model 同时具有条件生成和非条件生成的能力。具体来说,在训练阶段我们随机 Dropout condition c,而在测试阶段我们在生成阶段的去噪过程中,使用下式代替我们预测的噪声结果:
ϵ~θ(zt,c)=wϵθ(zt,c)+(1−w)ϵθ(zt)
也就是说:
如果设置 w=1 表示我们禁用了这个 Classifier-free 的 Guidance,而在正常使用中我们一般都设置 w>1。从隐空间的角度来看,我们实际上是在对 无条件生成时预测的噪声 和 条件生成时预测的噪声 做外插。
Latent Space
这一节我们从 Pixel Space 前往 Latent Space,阐释 Stable Diffusion 模型相对于前面的 Diffusion Model 的改进。
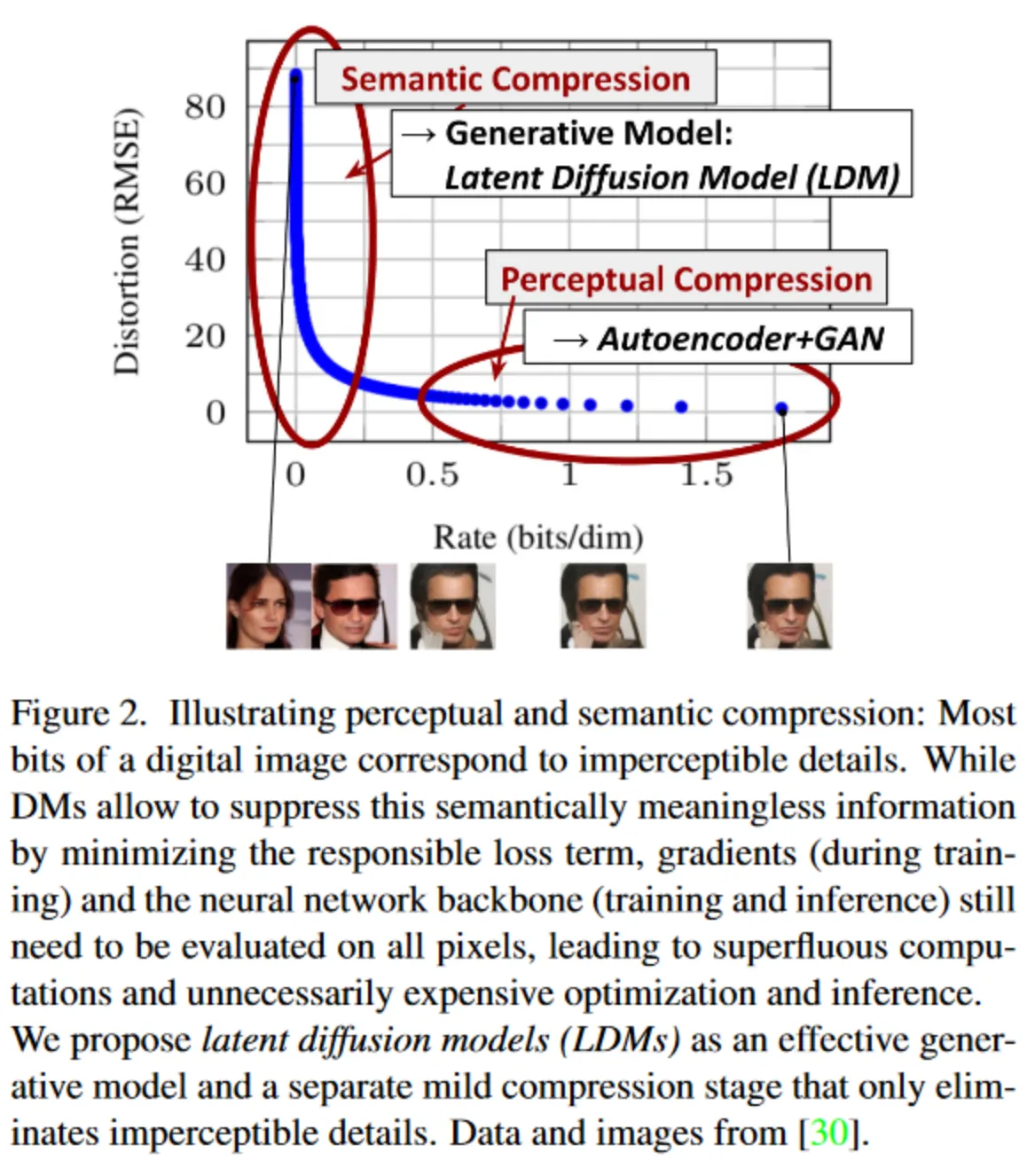
首先是 Stable Diffusion 的 Motivation。如果相对一张图片进行压缩,一般分为两个阶段:首先是感知压缩(perceptual compression)阶段,它对应图片中的高频细节;而后是语义压缩(semantic compression)阶段,这个阶段更多的对应数据的语义和概念组成。传统的 Diffusion 方法的生成阶段既要恢复语义的压缩,又要恢复感知层面的压缩,因此花费了大量的计算在高频细节上。而如果我们把 Diffuse 和 Denoise 的对象改为隐空间中对语义对应的 latent code,便可以解决这个麻烦。
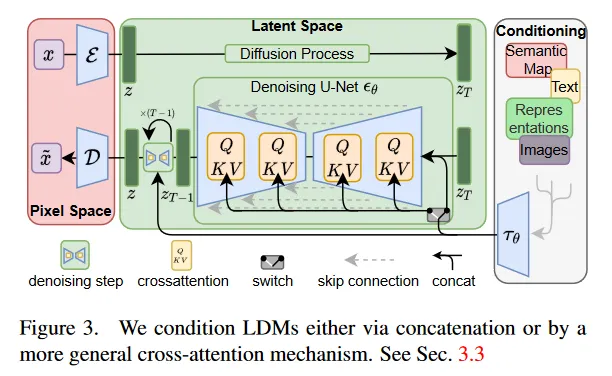
于是,我们首先使用 VQGAN 建模这个 pixel space 到 latent space 的转换过程。我们使用一个 Encoder E 和一个 Decoder D 来建模这个转换过程,在训练过程中使用重建 Loss,辅以计算隐空间与标准正态分布的 KL Divergence 作为隐空间正则损失。
之后我们所有的 Diffusion 与 Denoising 过程均在隐空间中进行,操作的具体对象是这个隐空间中的 latent code。
至于加 condition 的方法,我们可以采用 cross attention layer 来进行。具体来说,我们将 condition 用编码器 τθ 编码,之后将 condition feature 与 latent code 之间做 cross attention,其中 Q 由 latent code 投影得到,K 和 V 由 condition feature 投影得到。